
Автоматизированная система радиомониторинга "АРМАДА"
Автоматизированная система радиомониторинга (АСРМ) АРМАДА разработана согласно рекомендациям Международного Союза электросвязи [1, 2, 3, 4, 5]. Она имеет клиент-серверную архитектуру, реализована с использованием web технологий и предназначена для решения задач радиоконтроля (РК) на национальном, региональном, городском и районных уровнях, включая:
- предоставление администрации, управляющей использованием электромагнитного спектра, информации о фактическом использовании частот;
- измерение технических параметров излучений радиоэлектронных средств и высокочастотных устройств, проверка их соответствия регламентам, сертификатам и лицензиям;
- решение оперативных, плановых и фоновых задач радиоконтроля;
- обнаружение, идентификация и локализация на местности несанкционированных источников радиоизлучения и источников радиопомех, а также источников, запрещенных к эксплуатации;
- исследования в области распространения радиоволн и электромагнитной совместимости радиоэлектронных средств для совершенствования методов планирования использования спектра.
Система имеет следующие основные особенности:
- открытую архитектуру, возможность подключения дополнительных программных подсистем, блоков и модулей, в том числе разработанных сторонними производителями;
- открытый унифицированный протокол управления аппаратурой РК, возможность использования оборудования сторонних производителей;
- иерархический принцип построения: каждый нижний уровень системы предоставляет доступ узлам вышестоящего уровня; узлами системы являются центры (пункты) управления и станции радиомониторинга;
- использование во всех узлах однотипного программного обеспечения - серверов РК;
- возможность модификации перечня и содержания задач радиоконтроля.
АСРМ АРМАДА обеспечивает интеграцию с произвольной системой управления радиочастотным спектром путем выполнения необходимых экспортно-импортных операции, как проиллюстрировано на Рис 1.
В состав АСРМ входят центры и пункты управления, которые организуют работу системы. Каждый центр обслуживает соответствующий ему регион и обеспечивает согласованную работу подчиненных узлов. Количество уровней иерархии определяется назначением и масштабом системы. На Рис 2 представлена структурная схема трехуровневой системы.
ЦЕНТР УПРАВЛЕНИЯ
Центр управления представляет собой комплекс программно-аппаратных средств, обеспечивающий организационное взаимодействие и функционирование элементов АСРМ, предоставляет возможность анализа текущего состояния системы, планирования сценариев работы, выбора управленческих решений, постановки задач радиоконтроля и обработки. Центр управления взаимодействует с пунктами управления или, если необходимо, непосредственно со станциями радиомониторинга.
На Рис 3 представлена возможная структура центра управления, включающая несколько технических подсистем, обязательными из которых являются следующие:
- управления,
- связи и передачи данных,
- электропитания.
Подсистема управления обеспечивает управление силами и средствами радиоконтроля, выполняет мониторинг текущего состояния системы, осуществляет диагностику неисправностей в случае их возникновения, постобработку результатов решения задач РК, принятие решений при возникновении нештатных ситуаций, организует обмен данными с взаимодействующими ведомствами.
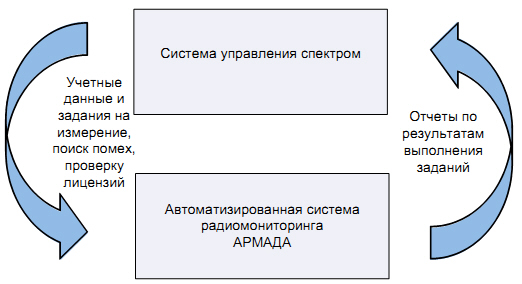
Рис 1. Взаимодействие между АСРМ АРМАДА и системой управления спектром
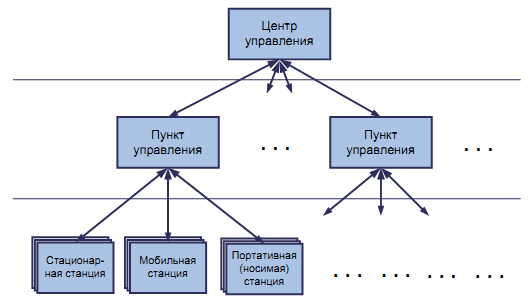
Рис 2. Структурная схема АСРМ АРМАДА
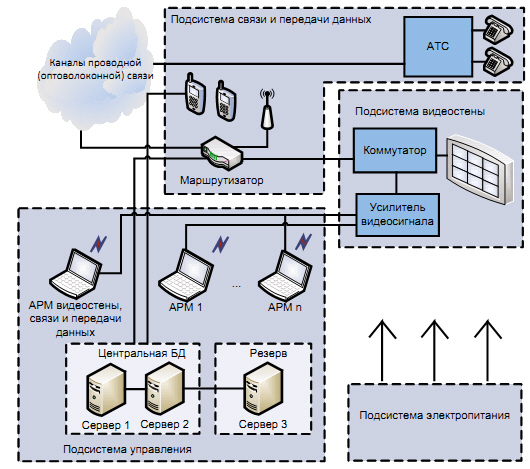
Рис 3. Возможная структура центра управления
В состав подсистемы управления входят автоматизированные рабочие места (АРМ) операторов, комплект серверного оборудования центральной базы данных (БД). На Рис 3 показаны три сервера, два из которых объединены в кластер и используются для хранения основной БД. Третий сервер предназначен для хранения резервных копий данных системы. Автоматизированные рабочие места операторов объединены сетью беспроводного доступа.
Автоматизированные рабочие места предназначены для управления АСРМ, их количество и специализация зависит от площади региона, организации управления в ведомстве, которое обслуживает АСРМ, количественного и качественного состава станций радиоконтроля, используемых в системе. К примеру, могут быть следующие автоматизированные рабочие места:
- оперативного руководителя;
- стационарных средств;
- мобильных средств;
- контроля состояния и управления конфигурацией системы;
- планирования работы, связи с системой управления спектром и т.д.
Специализация АРМ определяется загруженным клиентским программным обеспечением и может меняться в зависимости от конкретной ситуации.
Подсистема связи и передачи данных обеспечивает обмен данными внутри центра управления, обеспечивает связь с внешними узлами системы: измерительными и пеленгаторными станциями, а также другими центрами или пунктами управления. Для голосовой связи имеются телефоны с гарнитурами, подключенные к АТС, а также радиостанции.
Среди прочих подсистем центра управления можно указать подсистему видеостены, которая делает возможным отображение большого объема информации на видеоэкране, что благоприятно сказывается на качестве анализа информации и принятии адекватных решений при планировании и постановке задач радиоконтроля, проверке состояния системы, обработке и анализе результатов работы.
Пункты управления предназначены для управления группой станций радиомониторинга в выделенном районе. По своей структуре пункты управления напоминают центр управления в уменьшенном масштабе, как правило, они не имеют специально выделенных серверов для базы данных.
СТАНЦИИ РАДИОКОНТРОЛЯ
Станции радиоконтроля (радиомониторинга) осуществляют радиоконтроль с помощью имеющегося в их составе оборудования радиоконтроля. В системе может использоваться несколько видов станций РК:
- стационарные (фиксированные) станции в обслуживаемом и необслуживаемом исполнении;
- подвижные (мобильные) станции;
- транспортируемые (носимые) станции.
Станции являются следующими за пунктами управления уровнями иерархии системы, при этом стационарная или мобильная станция может быть совмещена с пунктом управления.
Стационарные станции обычно располагаются в густонаселенных местах, крупных городах, промышленных центрах. Необходимое количество станций определяется площадью, рельефом местности, типом используемых РЭС в данном районе. Для определения координат источников любая точка контролируемой территории должна находиться в зоне действия, по крайней мере, двух пеленгаторных или измерительно-пеленгаторных станций. Однако при таком подходе количество станций и стоимость системы может значительно вырасти. Поэтому часто более предпочтительна структура, когда стационарные станции дополнены мобильными и необслуживаемыми транспортируемыми станциями (сенсорами).
Мобильные станции могут быстро переместиться в район, находящийся вне зоны действия стационарных средств. Они эффективны для проведения операций радиоконтроля, когда малая мощность передатчиков, высокая направленность передающих антенн, удаленность источника радиоизлучения усложняют или делают невозможным проведение измерений стационарными средствами. Возможна одиночная работа мобильной станции по измерению параметров и локализации источников радиоизлучения [7].
Транспортируемые станции не требуют специальных условий для размещения, включая наличие специальных помещений или автомобилей, они могут выноситься в удаленные районы, подлежащие контролю, размещаться в труднодоступных районах, например, на крышах высотных зданий. Транспортируемые станции особенно эффективны, если требуется быстрое разворачивание дополнительных средств радиоконтроля.
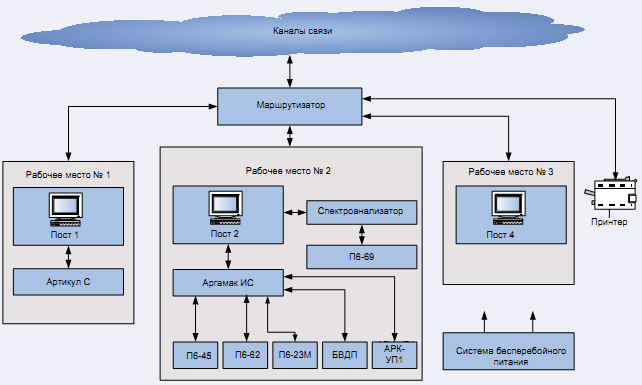
Рис 4 Структурная схема обслуживаемой стационарной станции АРЧА-И
Рассмотрим несколько примеров построения станций.
Обслуживаемая стационарная измерительная станция АРЧА-И используется для мониторинга и пеленгования радиоэлектронных средств (РЭС) в ВЧ, ОВЧ, УВЧ, СВЧ диапазонах. При этом измерение параметров сигналов и амплитудное пеленгование осуществляются до частоты 18 ГГц (и выше при наличии соответствующего спектроанализатора), а максимальный диапазон частот автоматического пеленгования составляет 1,5 - 8000 МГц. Структурная схема станции изображена на Рис 4.
Пост 1 осуществляет обнаружения и пеленгование сигналов. Он имеет в своем составе стационарный пеленгатор АРТИКУЛ-С (в базовом варианте рабочий диапазон 20 -3000 МГц, может быть дополнен диапазонами 1,5 - 20 МГц и 3000 - 8000 МГц). Малый вес, простота развертывания, размещение многоканального радиоприемного устройства непосредственно в антенной системе пеленгатора, передача по кабелю снижения сигналов на промежуточной частоте или в цифровом виде позволяют использовать кабели снижения длиной до нескольких сотен метров и размещать пеленгатор, например, на вышках сотовых передающих систем, как показано на Рис 5.
В состав поста 2, предназначенного для измерения параметров сигналов, входит панорамный измерительный приемник АРГАМАК-ИС, имеющий в базовом варианте рабочий диапазон частот 0,009-3000 МГц. Приемник имеет термо- и влагозащищенный корпус, что делает возможным его размещение вне помещений в непосредственной близости (на расстоянии нескольких метров) от используемых измерительных антенн. В зависимости от варианта исполнения цифровой обработчик приемника может находиться в отдельном от аналоговой части корпусе, или в одном корпусе с аналоговой частью. В первом варианте по кабелю снижения передается аналоговый сигнал ПЧ, во втором варианте - сигнал передается в цифровой форме. И первый и второй варианты делают возможным применение кабеля снижения длиной до нескольких сотен метров.
Измерительный приемник имеет коммутируемые диапазонные входы и помимо штатной антенны - блока выносного датчика поля (БВДП) к нему может быть подключено несколько измерительных антенн, например П6-45, П6-65, П6-23М. Если измерительные антенны закреплены на поворотном устройстве АРК-УП1М, как показано на Рис 6 и Рис 7, то становится возможной смена их ориентации и поляризации.
Все измерительные приемники и автоматические пеленгаторы производства компании ИРКОС, входящие в состав системы, строятся на базе цифровых панорамных приемников семейства АРГАМАК. Конкретные параметры приемников зависят от варианта исполнения. В варианте исполнения АРГАМАК+ полоса пропускания приемного тракта имеет ширину до 22 МГц, а скорость панорамного спектрального анализа составляет до 10 ГГц/c, типовая избирательность по побочным каналам 80 дБ, коэффициент шума 12-14 дБ, динамический диапазон 75 дБ. Малые масса и габариты приемников делают возможным их размещение в непосредственной близости от антенных систем, что устраняет антенный эффект, повышает чувствительность и динамический диапазон, обеспечивает высокую точность пеленгования (для стационарных пеленгаторов типовое значение инструментальной точности 1,5°, для мобильных 2° - 4°), упрощает калибровку измерительных трактов.
Пост 4 используется в качестве геоинформационного сервера. С его помощью отображаются информация по задачам радиоконтроля на электронной карте местности, включая местоположение источников радиоизлучения, распределение напряженности электромагнитного поля, зоны электромагнитной доступности. Станция обеспечивает ана-

Рис 5. Антенная система пеленгатора АРТИКУЛ-С
на вышке сотовой связи

Рис 6. Измерительные антенны поста измерения на основе АРГАМАК-ИС
на поворотном устройстве. Вертикальная поляризация

Рис 7. Измерительные антенны поста измерения на основе АРГАМАК-ИС
на поворотном устройстве. Горизонтальная поляризация
лиз сигналов цифровых сетей GSM, UMTS, CDMA, TETRA, DECT и сигналов цифрового телевидения DVB. Состав может дополняться постом 3, используемым, например, для регистрации контента телевизионных передач или для многоканального контроля, записи и технического анализа радиосигналов.
На Рис 8 показан пример антенных систем стационарной измерительной станции АРЧА-И на крыше многоэтажного здания.
Необслуживаемая измерительная стационарная станция АРЧА-ИН выполняет те же функции, что и обслуживаемая, но для ее работы не требуется непосредственного присутствия операторов, она управляется дистанционно по каналам связи. Оборудование имеет исполнение, не требующее служебных помещений. В состав станции входит необслуживаемые стационарный пеленгатор АРТИКУЛ-С (в базовом варианте 20 - 3000 МГц, дополняемом диапазонами 1,5-20 МГц и 3000-8000 МГц) и панорамный измерительный приемник АРГАМАК-ИС (в базовом варианте 20-3000 МГц, дополняемом диапазоном 3000 - 8000 МГц). Структурная схема необслуживаемой станции представлена на Рис 9.

Рис 8. Антенные системы обслуживаемой измерительной
станции АРЧА-И на крыше десятиэтажного здания
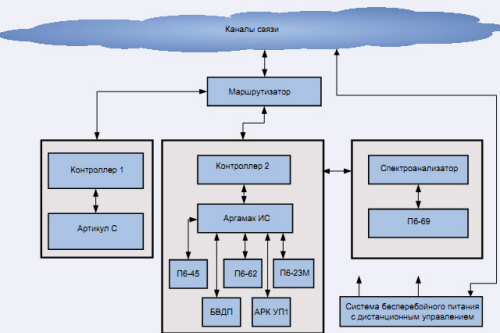
Рис 9. Структурная схема необслуживаемой стационарной станции АРЧА-И
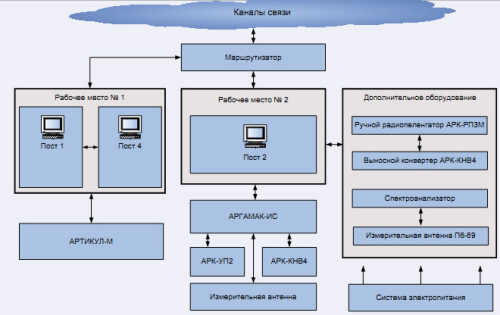
Рис 10 Структурная схема мобильной измерительной станции АРГУМЕНТ-И

Рис 11. Мобильная измерительная станция АРГУМЕНТ-И.
Пеленгаторная антенная система расположена
под обтекателем на всю крышу автомобиля
Мобильная измерительная станция АРГУМЕНТ-И предназначена для мониторинга, измерения параметров сигналов и пеленгования РЭС в ВЧ, ОВЧ, УВЧ и СВЧ диапазонах, при этом полный диапазон частот автоматического пеленгования составляет 1,5 - 8000 МГц, диапазон частот для измерений параметров сигналов до 18 ГГц. Возможная структурная схема мобильной измерительной станции АРГУМЕНТ-И представлена на Рис 10.
Функции постов мобильной измерительной станции аналогичны функциям постов стационарной измерительной станции, но мобильная станция способна выполнять задачи радиоконтроля в движении, работать вне зоны действия стационарных станций [1]. При этом обеспечивается анализ сигналов цифровых сетей связи GSM, UMTS, CDMA, TETRA, DECT, а также Wi-Fi и WiMAX, сигналов цифрового телевидения DVB. Для расширения диапазона мониторинга и амплитудного пеленгования в состав станции может входить спектроанализатор, например, Advantest U3772, последний позволяет расширить диапазон рабочих частот до 43 ГГц.
Транспортной базой мобильной измерительной станции обычно служит микроавтобус с длинной базой, как показано на Рис 11 - Рис 12.
Мобильная пеленгаторная станция АРГУМЕНТ предназначена для обнаружения, мониторинга и пеленгования РЭС в ВЧ, ОВЧ, УВЧ и СВЧ диапазонах. Она не имеет измерительного оборудования, в ее составе имеется только портативный автоматический пеленгатор. Поэтому в качестве транспортной базы вполне достаточно легкового автомобиля повышенной проходимости, как показано на Рис 13.

Рис 12. Мобильная станция АРГУМЕНТ-И
со съемной пеленгаторной антенной системой

Рис 13. АРТИКУЛ-Н1 в мобильном варианте.
Пеленгаторная антенная система
размещена в штатном багажном боксе
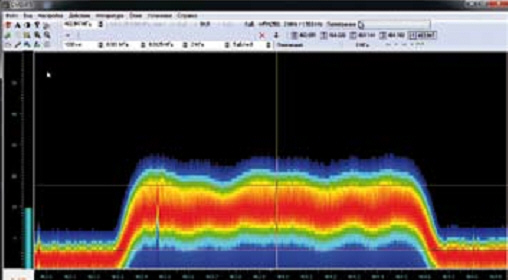
Рис 14. Вероятностный спектр на экране ПЭВМ
Рис 15. Мгновенный и накопленный спектры

Рис 16. Вероятностный спектр

Рис 17. Трек движения и ориентация антенны
пеленгатора на фоне карты местности
В состав станции входит мобильный (носимый) автоматический пеленгатор АРТИКУЛ-Н1 (базовый диапазон приёма 9 кГц-3 ГГц, дополнительные антенные системы для автоматического пеленгования: АС-НП2 в диапазоне 3 - 8 ГГц, АС-НП0 в диапазоне 1,5 - 30 МГц) с опцией навигации.
Для решения задач «последней мили» в состав станций входит, как правило, носимое оборудование: ручной радиопеленгатор АРК-РП3М (базовый рабочий диапазон частот 0,3-3000 МГц, опционально до 8 или 18 ГГц) или носимый измерительный комплекс АРК-НК5И. Данное оборудование может управляться от портативного ноутбука с операционной системой Windows 7 или Windows ХР, а также планшетного компьютера и коммуникатора с операционной системой Android. При использовании беспроводного интерфейса, например, GPRS, EDGE, Wi-Fi или 3G, носимое оборудование может работать в автоматизированном режиме непосредственно в составе АСРМ АРМАДА.
В качестве примера результатов использования носимого радиопеленгатора АРК-РП3М под управлением ПЭВМ на Рис 14 приведен вероятностный спектр сигнала CDMA. В полосе сигнала ясно видна узкополосная составляющая, источник которой, используя направленные антенны, можно запеленговать и локализовать как на открытой местности, так и внутри помещений. В другом примере радиопеленгатором управляет портативный телефон-коммуникатор, на рисунках приведены его экраны в режимах отображения мгновенного и накопленного спектра сигнала Bluetooth (Рис 15), а также вероятностного спектра (Рис 16).
Возможно также отображение на экране коммуникатора треков движения, текущего положения пеленгатора, а также пеленгов, как показано на Рис 17.
В состав ручного пеленгатора помимо антенн для открытого пеленгования могут входить антенны для скрытной работы, это особенно важно в случаях, когда привлечение внимания к работе оператора нежелательно, например, во время публичных мероприятий с большим скоплением людей.
Программное обеспечение системы
АСРМ АРМАДА представляет собой совокупность узлов, объединённых сетью передачи данных, способных к дистанционно управляемому и автономному функционированию в соответствии с поставленными задачами. При использовании публичной сети для обеспечения безопасности могут применяться технологии VPN.
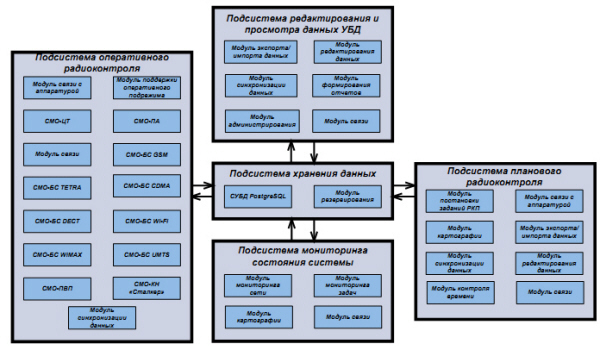
Рис 18. Программные подсистемы СМО АРМАДА
Для упрощения развертывания, сопровождения и обучения персонала в узлах АСРМ АРМАДА используется унифицированное программное обеспечение - сервера радиоконтроля, которые имеют однотипную структуру на всех узлах системы. Отличие серверов друг от друга состоит только в объемах баз данных и возможностях по управлению. Чем выше уровень сервера в системе, тем больше информации хранится в его базе данных, тем больше нижестоящих серверов ему подчиняются. Сервер РК, расположенный на более высоком уровне, имеет возможность получения информации, хранящейся на подконтрольных серверах радиоконтроля, а также оперативный доступ к аппаратуре радиоконтроля. При этом для обеспечения быстрого реагирования на местные условия сохраняется возможность выполнения задач радиоконтроля, инициированных на нижних уровнях иерархии, с возможностью контроля результатов их выполнения на верхнем уровне.
Программное обеспечение сервера РК представлено пакетом программ СМО АРМАДА, структурная схема которого представлена на Рис 18. Как видно из рисунка, СМО АРМАДА состоит из следующих функциональных подсистем:
- хранения данных;
- ввода, редактирования и просмотра данных УБД;
- оперативного радиоконтроля;
- планового радиоконтроля;
- мониторинга состояния системы.
Работа каждой из подсистем обеспечивается соответствующими программными модулями, отвечающими за ее функционирование. Поскольку система имеет открытую архитектуру, то разработка новых модулей, расширяющих функциональность системы, может осуществляться сторонними производителями программного обеспечения.
Программное обеспечение системы предоставляет пользовательский интерфейс для работы в следующих режимах:
- администрирования;
- оперативном;
- плановом;
- обработки результатов РК;
- контроля состояния системы.
Полезной особенностью подсистем редактирования и просмотра данных УБД, планового радиоконтроля и контроля состояния системы является возможность выполнения функций через WEB-браузер. Это позволяет упростить развертывание программного обеспечения, обеспечивает возможность удаленной работы с системой независимо от местонахождения оператора и используемой им программной и аппаратной платформы.
Использование оборудования другиж производителей
Типовой проблемой, препятствующей созданию масштабной территориально-распределенной автоматизированной системы радиоконтроля, является использование радиочастотной службой оборудования разных производителей, которое не только различается по своим техническим и метрологическим характеристикам, но и имеет различные протоколы управления.
Программное обеспечение, поставляемое производителем аппаратуры, как правило, позволяет решать задачи радиоконтроля применительно только к «своему» виду оборудования. В то же время в радиочастотных службах в настоящее время имеется парк вполне работоспособных приборов, приобретенных у различных производителей, следовательно, необходима интеграция разнотипных средств измерений в структуре автоматизированной системы. Кроме того, подобная интеграция дает возможность использования сильных сторон той или иной аппаратуры, снижает опасность монополизма конкретного производителя.
Возможный вариант построения системы с разнотипным оборудованием основан на обмене данными между модулем программного обеспечения - драйвера аппаратуры, обеспечивающего непосредственное управление аппаратурой, и остальной системой через БД радиоконтроля. Задачи на измерения поступают в БД радиоконтроля, драйвер аппаратуры должен сканировать БД в ожидании поступления новых задач. Результаты выполнения поставленных задач также сохраняются в БД. Таким образом, модуль драйвера аппаратуры работает непосредственно с БД радиоконтроля, при появлении новой задачи он выполняет необходимые для ее решения действия с аппаратурой, результаты своей работы драйвер также заносит в БД.
К сожалению, у предложенного варианта имеется несколько существенных недостатков. Во-первых, каждый производитель драйвера аппаратуры обязан знать структуру БД радиоконтроля. В базе данных должны иметься записи, предназначенные для обработки и хранения данных, полученных от определенной аппаратуры. Использование аппаратуры новых производителей вызовет появление дополнительных промежуточных таблиц, структура БД будет усложняться.
Во-вторых, при любом изменении структуры БД, например, при появлении новых типовых задач, потребуется обращения к производителю драйвера аппаратуры для внесения изменений в код драйвера, что не всегда возможно.
В-третьих, предоставление информации о структуре БД сторонним организациям не всегда желательно.
В-четвертых, обмен данными с аппаратурой производится через БД, что неизбежно снижает производительность системы, и реализовать такие возможности, как наблюдение спектра сигнала в реальном времени становится проблематичным.
В АСРМ АРМАДА реализован более перспективный подход, основанный на разделении процессов работы с аппаратурой и с БД радиоконтроля. Работой аппаратуры по-прежнему непосредственно управляет драйвер аппаратуры, но работу с БД осуществляет другое программное обеспечение - модуль связи с аппаратурой. При этом, учитывая территориально распределенный характер системы, модуль связи с аппаратурой передает запросы в драйвер аппаратуры и получает результаты измерения по открытому унифицированному сетевому протоколу.
Производитель драйвера аппаратуры обязан обеспечить работу своего модуля по известному протоколу, который не привязан непосредственно к структуре БД, а зависит только от измерительных задач. По сути, драйвер аппаратуры в этом случае только лишь исполняет роль конвертора команд, переводящего запросы модуля связи во внутренние команды обмена с аппаратурой по протоколу производителя.
Открытый унифицированный протокол реализует формат записей, который позволяет варьировать длину команды в зависимости от ее содержимого. В зависимости от кода команды байты данных могут содержать как непосредственно данные (к примеру, уровень сигнала), так и вложенные (подчинённые) записи. Заголовок команды однозначно определяет длину команды, соответственно последовательность команд может быть просмотрена любой версией драйвера аппаратуры с игнорированием неизвестных параметров. Это позволяет не модифицировать драйвер уже используемой конкретной аппаратуры, если в протокол будут внесены дополнительные команды.
Метрологическое обеспечение системы
Измерительные средства производства компании ИРКОС, используемые в системе, имеют государственные сертификаты Российской Федерации на тип средства измерений. Измерения осуществляются по аттестованной методике выполнения измерений [8], удовлетворяют рекомендациям ITU-R SM.328, ITU-R SM.377, ITU-R SM.378, ITU-R SM.443, ITU-R SM.1268, ITU-R SM.182, ITU-R SM.1536, ITU-R SM.1793, государственным стандартам Российской Федерации ГОСТ Р 52536-2006, ГОСТ Р 53373-2009.
В число измеряемых параметров входят:
- пиковое, квазипиковое, среднеквадратическое и среднее значения напряженности поля и плотности потока мощности;
- частота радиоизлучений (немодулированных сигналов, сигналов с аналоговой амплитудной и частотной модуляцией, сигналов с цифровыми видами модуляции);
- ширина полосы радиосигналов по методам X дБ и р/2;
- коэффициент амплитудной модуляции;
- девиация частоты сигналов с частотной модуляцией;
- разнос частот сигналов с частотной манипуляцией;
- скорость модуляции сигналов с цифровыми видами модуляции;
- частота поднесущей для стереофонического радиовещания с ЧМ;
- занятость частотных каналов.
Заключение
АСРМ АРМАДА соответствует рекомендациям МСЭ и имеет особенности, упрощающие ее использование на национальном уровне: открытую архитектуру с возможностью расширения функциональности, поддержку измерительной аппаратуры разных производителей, гибкую систему формирования содержания задач радиоконтроля, возможность интеграции с автоматизированной системой управления спектром.
Стационарные и мобильные средства радиоконтроля, входящие в состав АСРМ базируются на быстродействующих панорамных цифровых приемниках семейства АРГАМАК, АРГАМАК+, имеющих высокую чувствительность, линейность, малый вес и габариты.
Программное обеспечение СМО АРМАДА позволяет осуществлять мероприятия радиоконтроля в оперативном режиме, под непосредственным управлением оператора и в автоматическом плановом режиме по заранее сформулированным требованиям.
Описание актуально на: 12.06.2012.
Для уточнения технических характеристик «Автоматизированная система радиомониторинга "АРМАДА"», а также для получения информации по наличию и условиям поставки Вы можете заполнить форму запроса ниже.
Внимание! Поставка оборудования осуществляется только юридическим лицами и только по безналичному расчёту.